Download:
Abstract:
Human-level autonomous driving is an ever-elusive goal, with planning and decision making – the cognitive functions that determine driving behavior – posing the greatest challenge. Despite a proliferation of promising approaches, progress is stifled by the difficulty of deploying experimental planners in naturalistic settings. In this work, we propose Lab2Car, an optimization-based wrapper that can take a trajectory sketch from an arbitrary motion planner and convert it to a safe, comfortable, dynamically feasible trajectory that the car can follow. This allows motion planners that do not provide such guarantees to be safely tested and optimized in real-world environments. We demonstrate the versatility of Lab2Car by using it to deploy a machine learning (ML) planner and a classical planner on self-driving cars in Las Vegas. The resulting systems handle challenging scenarios, such as cut-ins, overtaking, and yielding, in complex urban environments like casino pick-up/drop-off areas. Our work paves the way for quickly deploying and evaluating candidate motion planners in realistic settings, ensuring rapid iteration and accelerating progress towards human-level autonomy.
Real-world demonstration of Lab2Car driving in a dense urban environment
Figure 1: Lab2Car system architecture
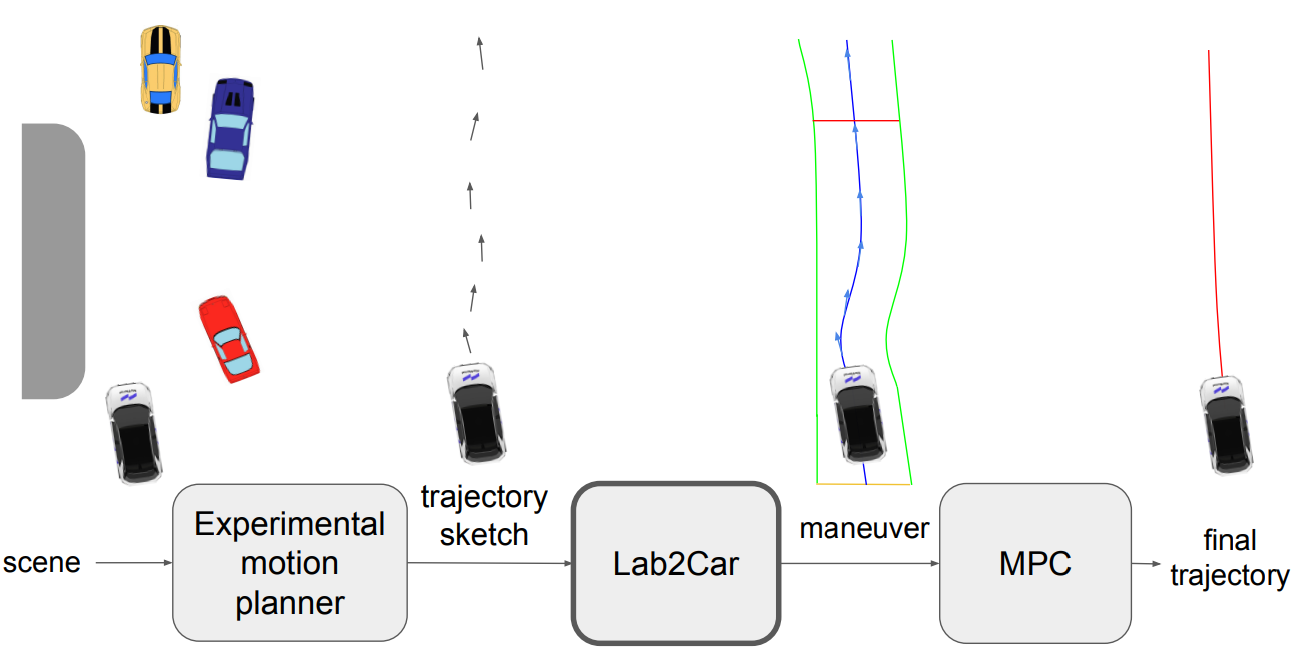
Figure 2: Anatomy of a maneuver (left) and spline-space illustration (right)
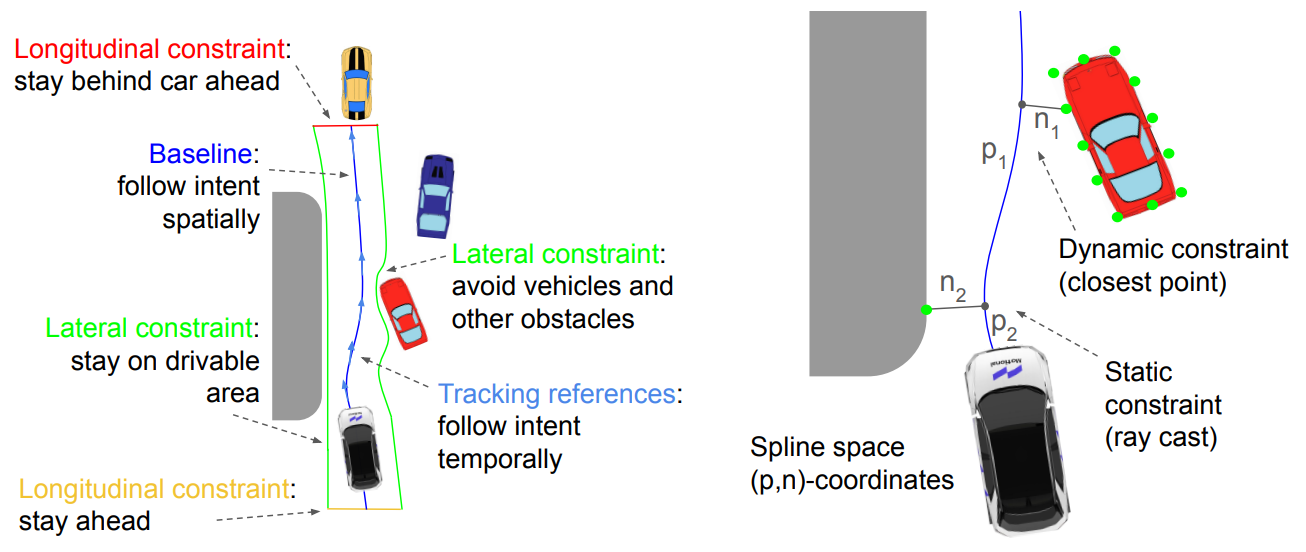
Figure 3: Lab2Car maneuver in real-world scenario
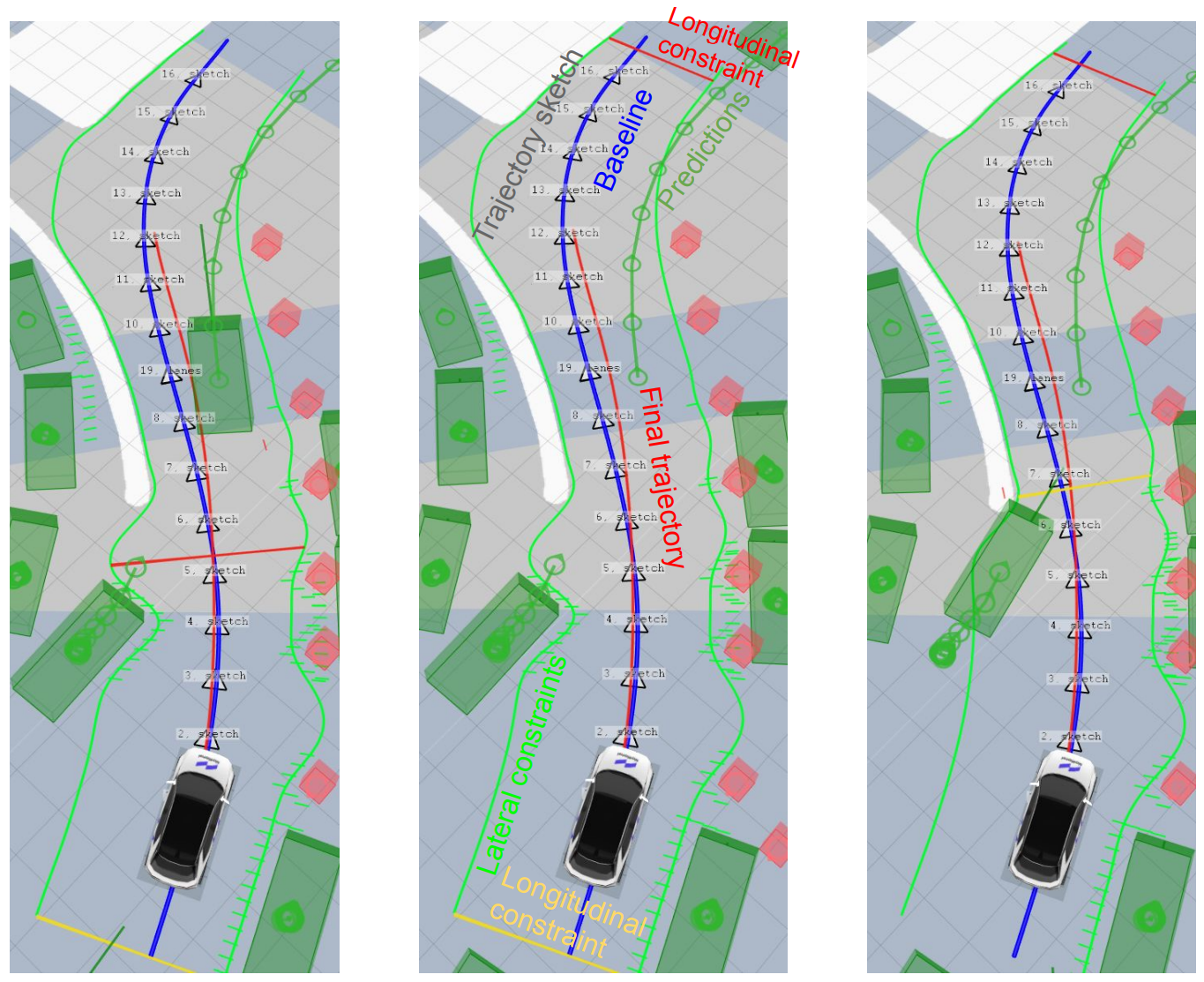
Figure 4: Lab2Car rescuing bad trajectories
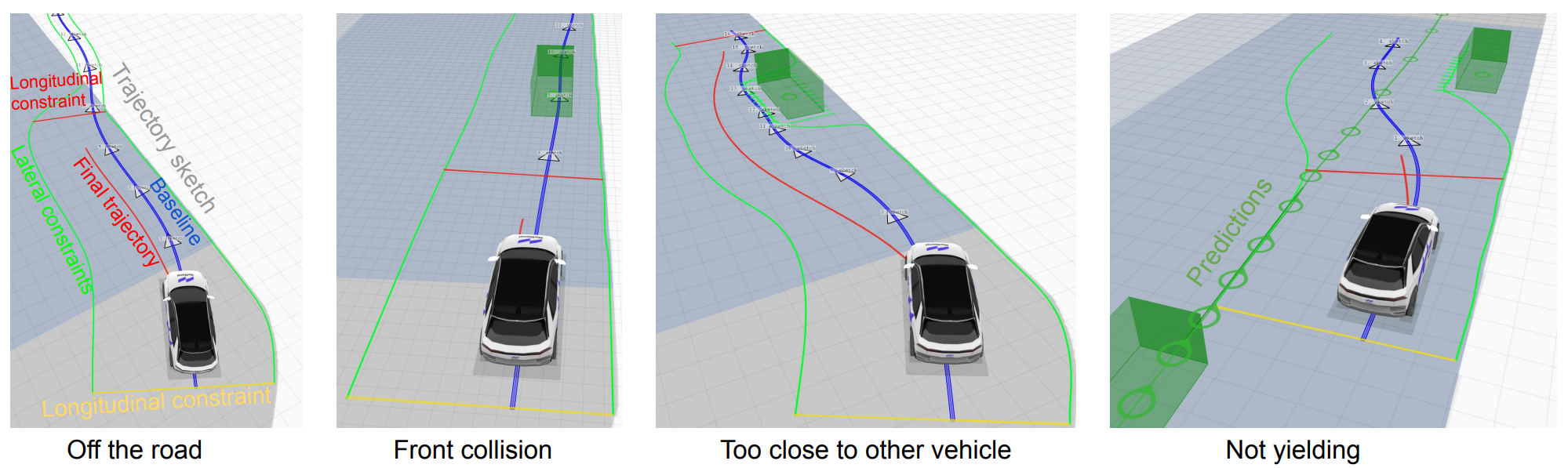
Figure 5: Lab2Car configurations (ablations)
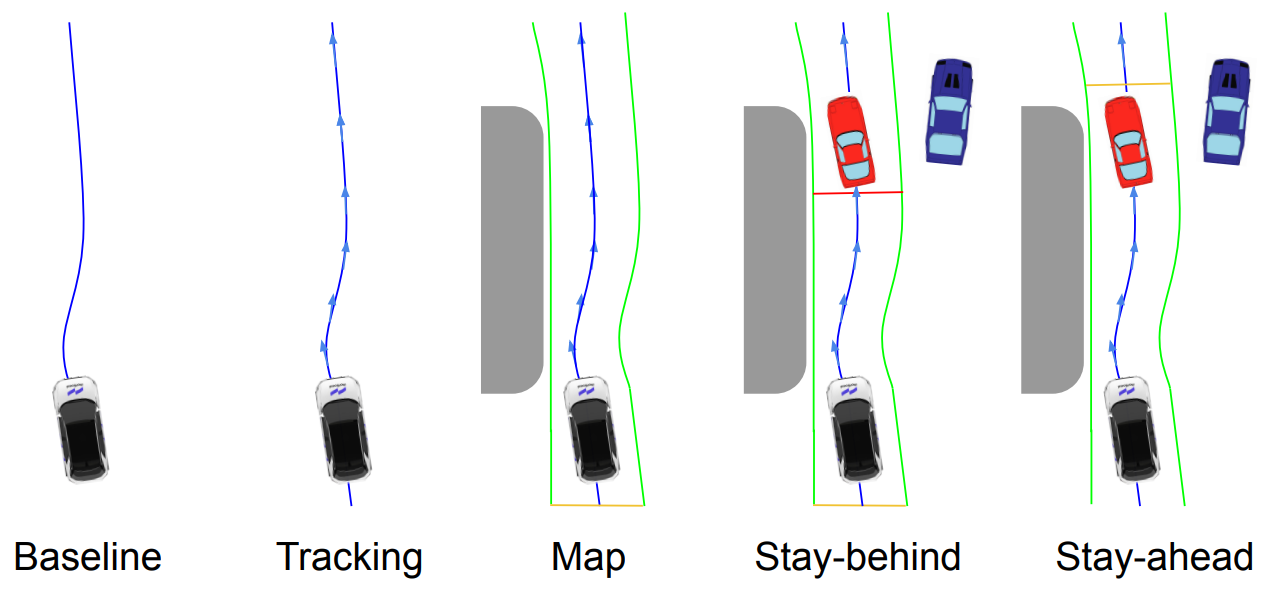
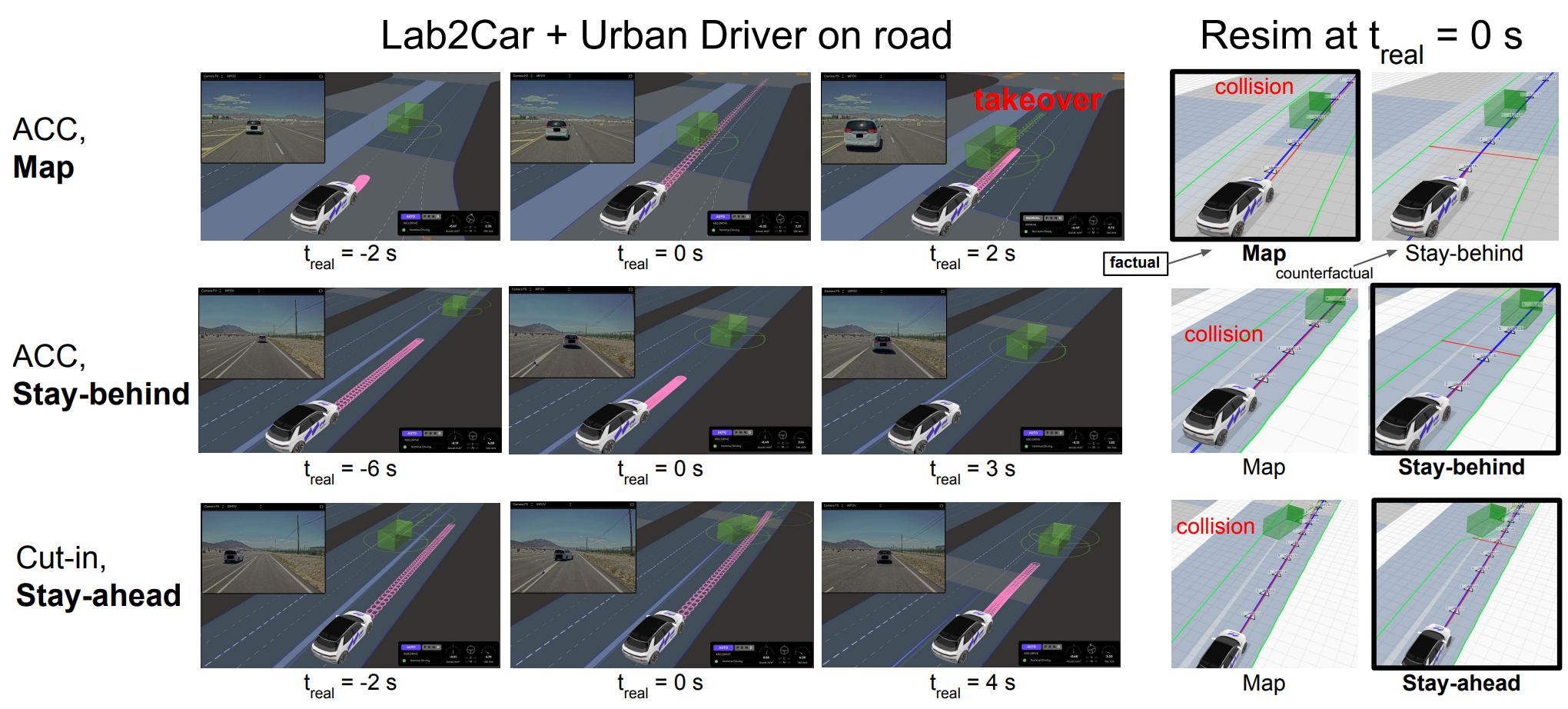
Figure 6: Lab2Car deployed on the car
Citation
Heim, M., Suarez-Ruiz, F., Bhuiyan, I., Brito, B., Tomov, M. S. (2024). “Lab2Car: A Versatile Wrapper for Deploying Experimental Planners in Complex Real-world Environments.” arXiv preprint arXiv:2409.09523.
@article{heim2024lab2car,
title={Lab2car: A versatile wrapper for deploying experimental planners in complex real-world environments},
author={Heim, Marc and Suarez-Ruiz, Francisco and Bhuiyan, Ishraq and Brito, Bruno and Tomov, Momchil S},
journal={arXiv preprint arXiv:2409.09523},
year={2024},
doi={10.1109/ICRA55743.2025.11128008},
url={https://doi.org/10.1109/ICRA55743.2025.11128008}
}