TreeIRL: Safe Urban Driving with Tree Search and Inverse Reinforcement Learning
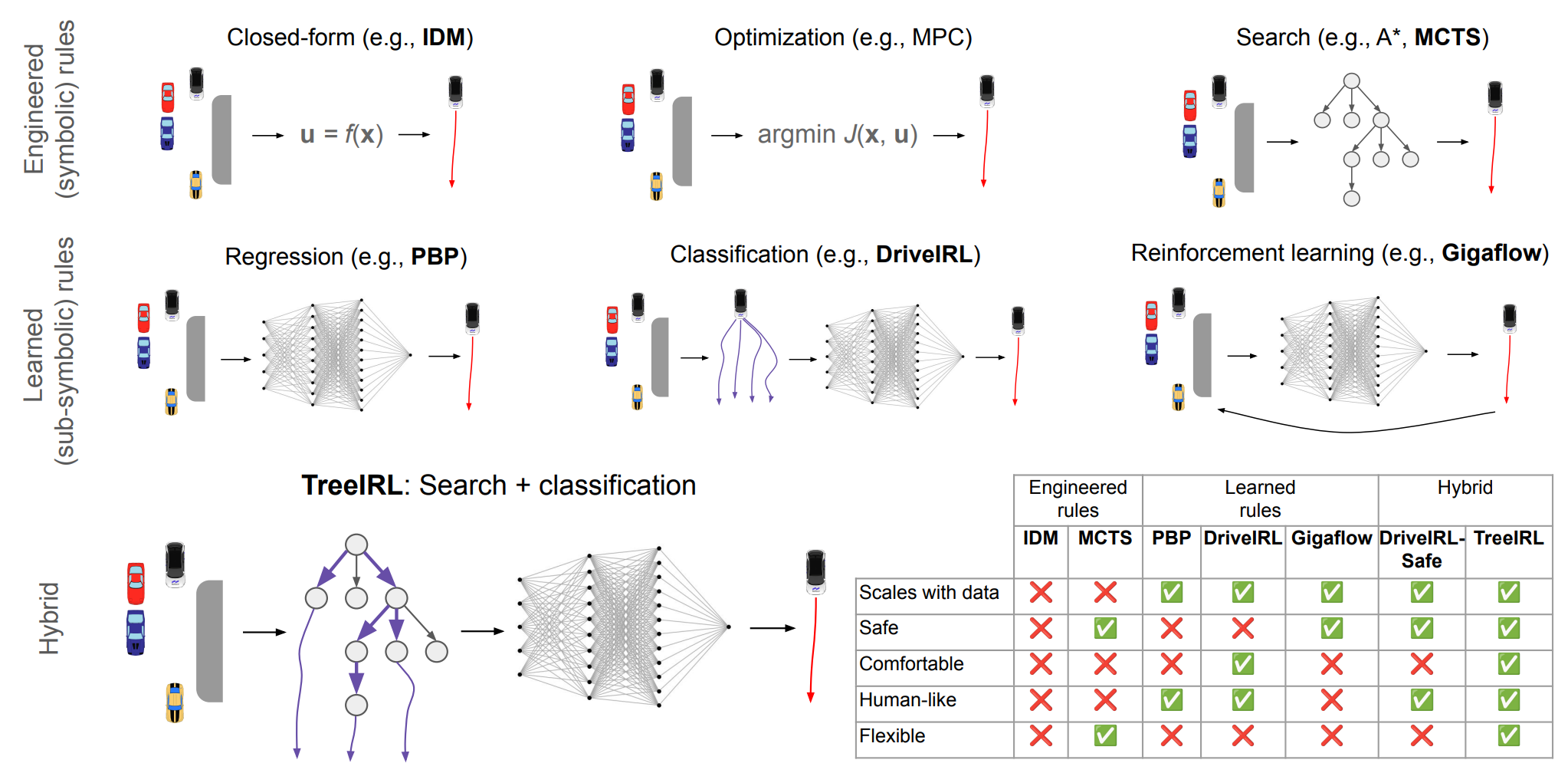
How can we combine search with ML for safe and human-like autonomous driving?
How can we combine search with ML for safe and human-like autonomous driving?
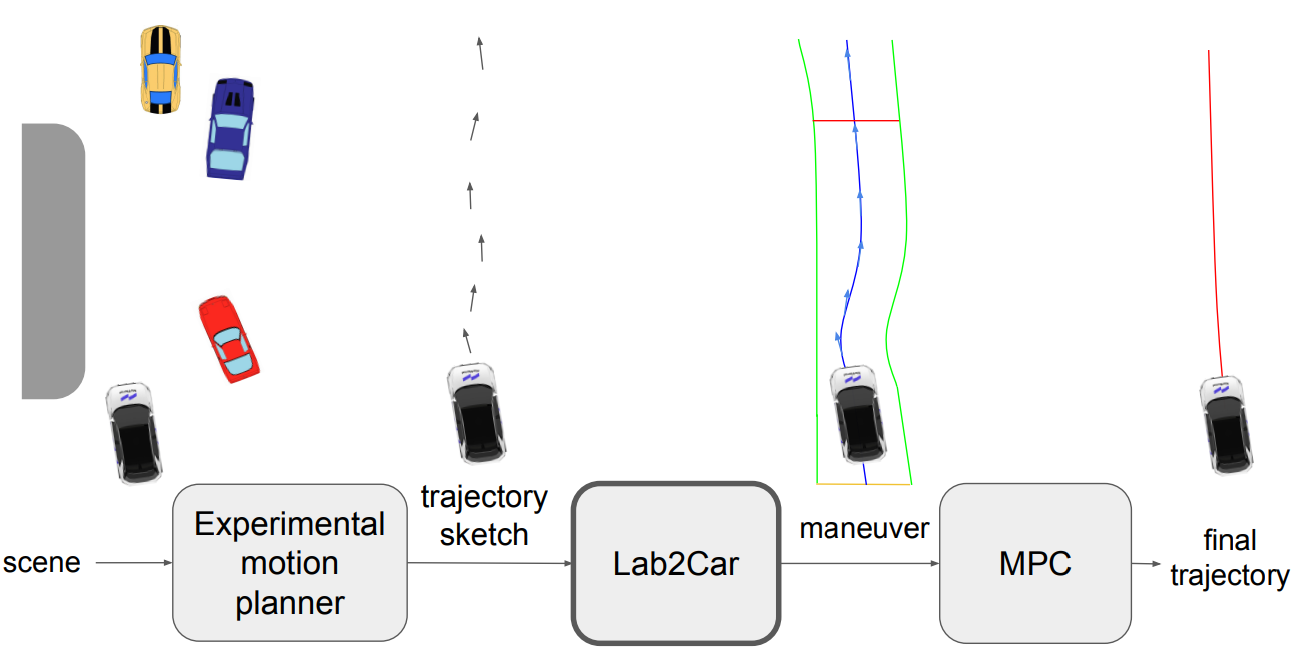
How can we safely deploy experimental motion planners at the early stages of development?
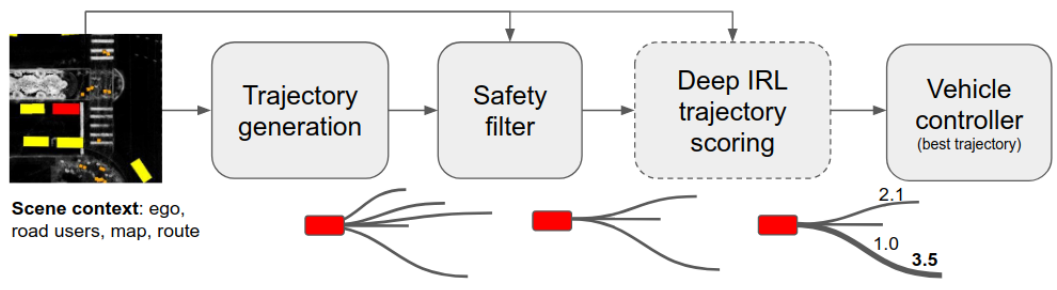
What is the intrinsic reward function of human drivers? How can we infer it and use it to drive an actual autonomous vehicle?