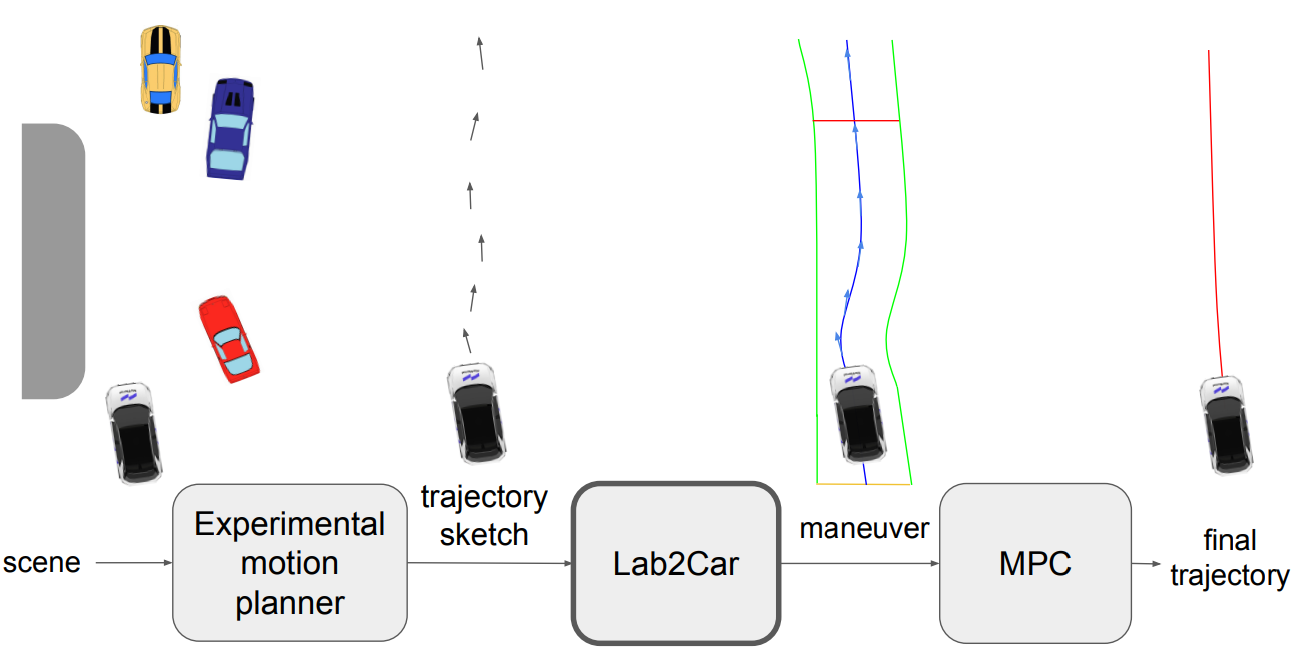
Lab2Car: A Versatile Wrapper for Deploying Experimental Planners in Complex Real-world Environments
How can we safely deploy experimental motion planners at the early stages of development?
How can we safely deploy experimental motion planners at the early stages of development?