TreeIRL: Safe Urban Driving with Tree Search and Inverse Reinforcement Learning
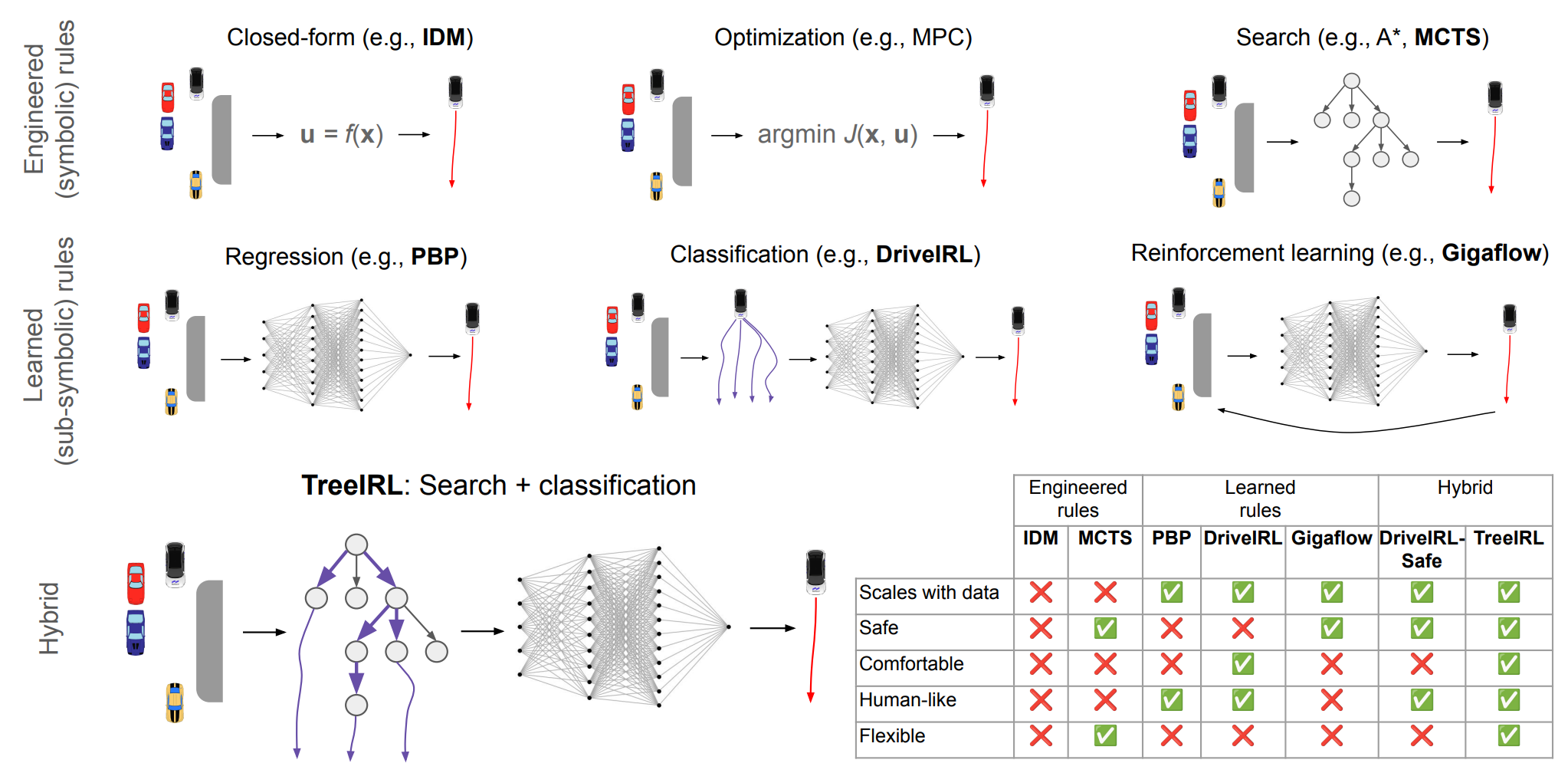
How can we combine search with ML for safe and human-like autonomous driving?
How can we combine search with ML for safe and human-like autonomous driving?
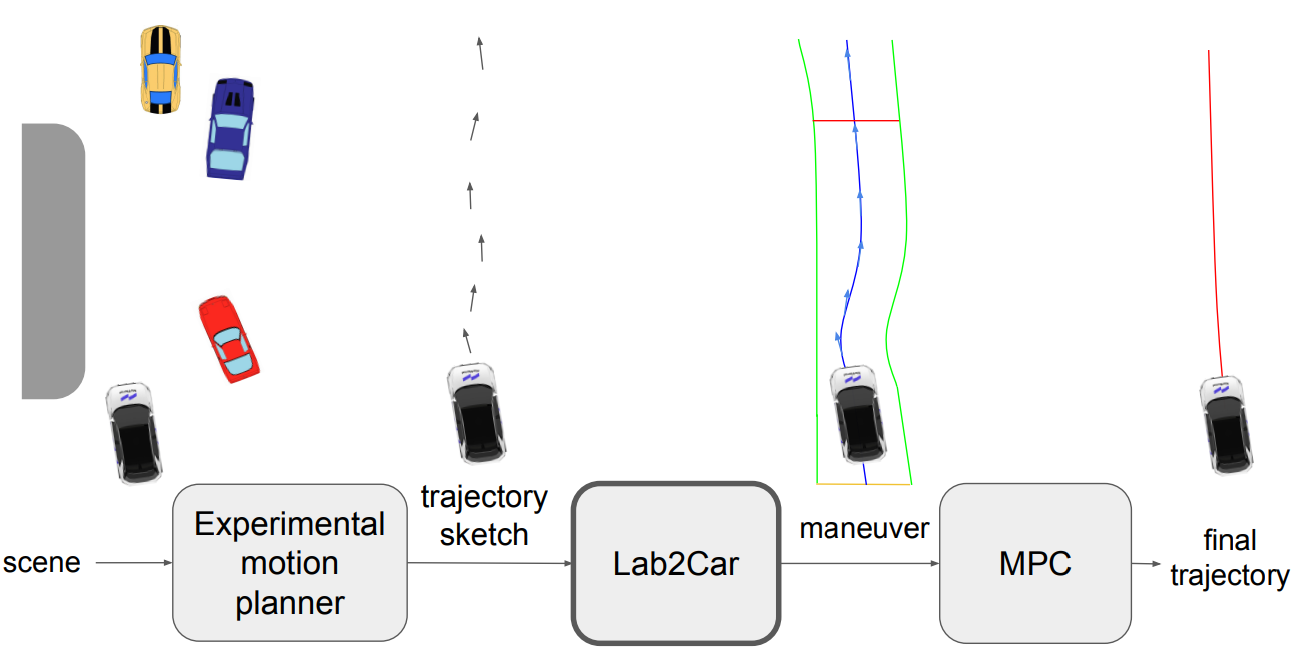
How can we safely deploy experimental motion planners at the early stages of development?