TreeIRL: Safe Urban Driving with Tree Search and Inverse Reinforcement Learning
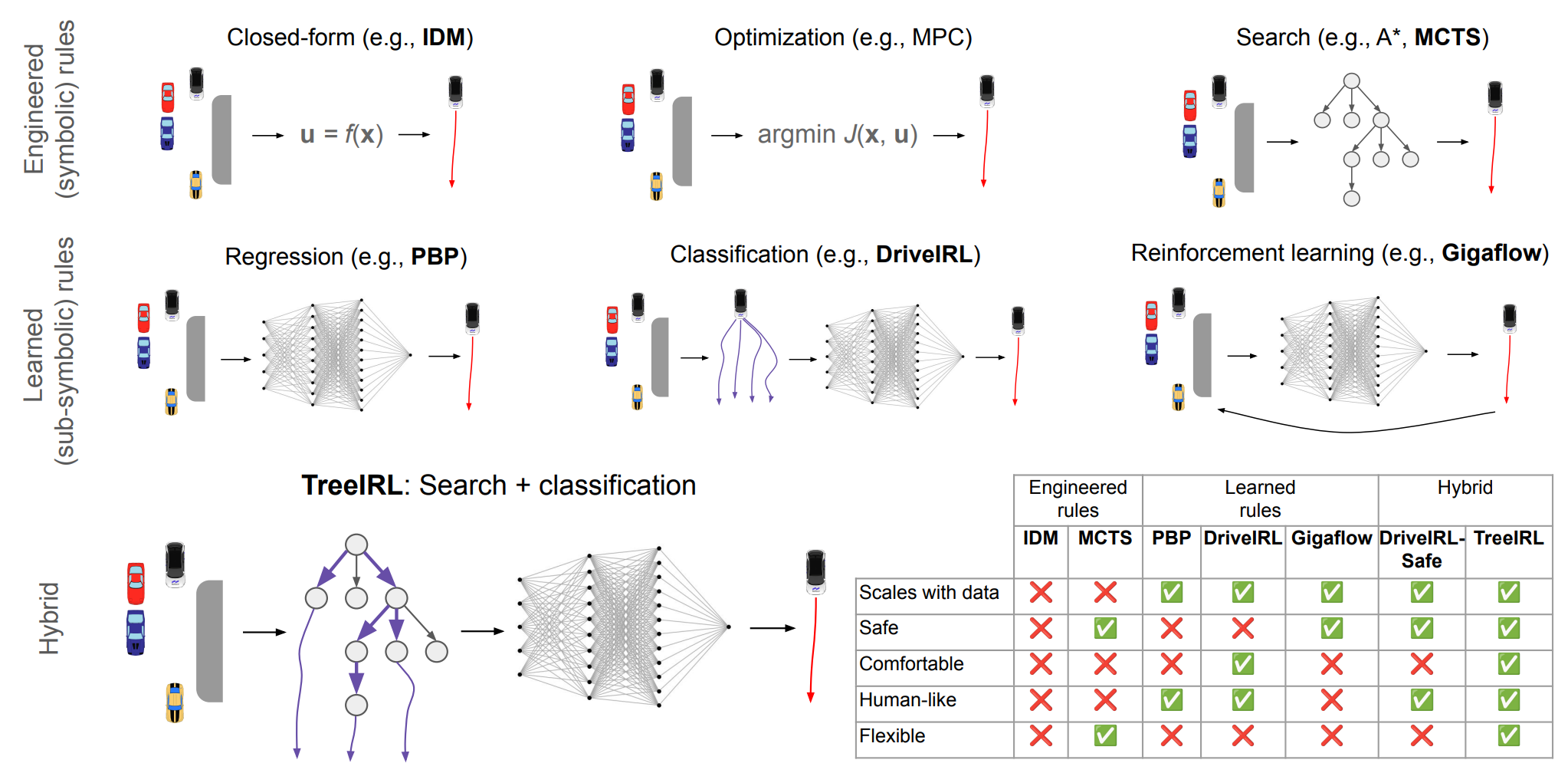
How can we combine search with ML for safe and human-like autonomous driving?
How can we combine search with ML for safe and human-like autonomous driving?
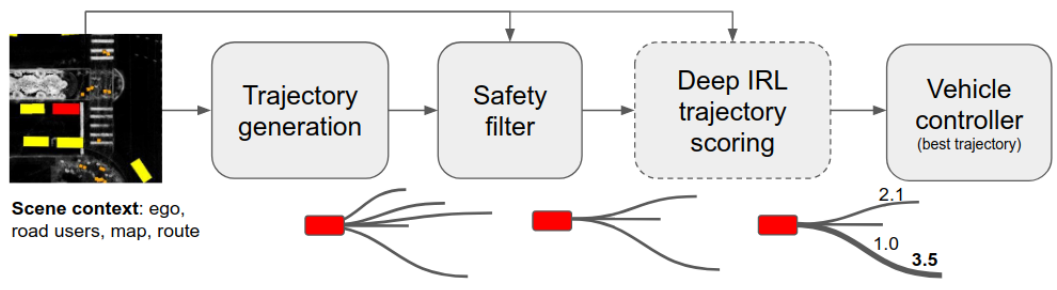
What is the intrinsic reward function of human drivers? How can we infer it and use it to drive an actual autonomous vehicle?